- Locomotion : "power of motion from place to place" 어떠한 움직임으로 옮겨 다니는지
- Basic Laws of Physics to Describe Wheeled Motion

가정) 등속운동을 한다면
- Differential Drive Robot


- ICC(Instantaneous Center of Curvature)
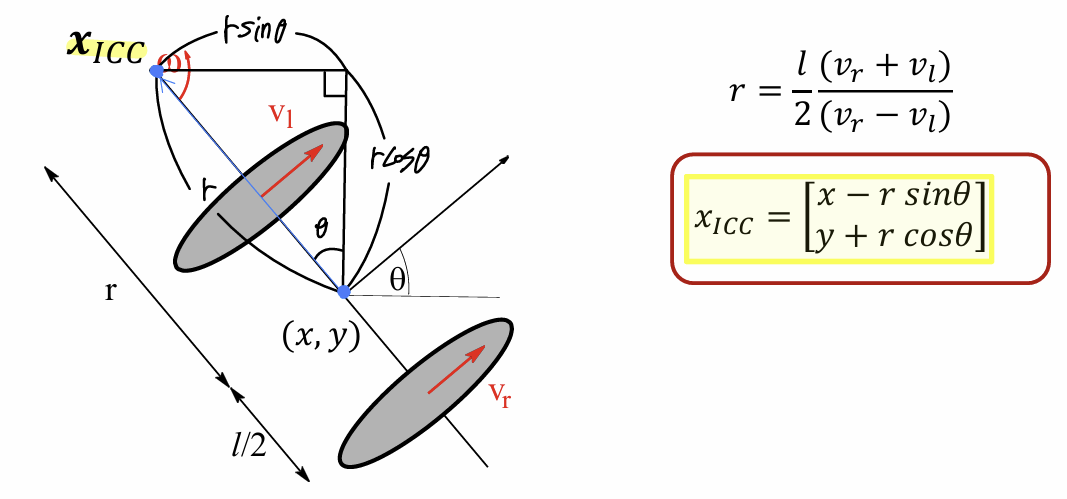
- Forward Kinematics

정지해 있다가 움직였다.
- Ackermann Drive
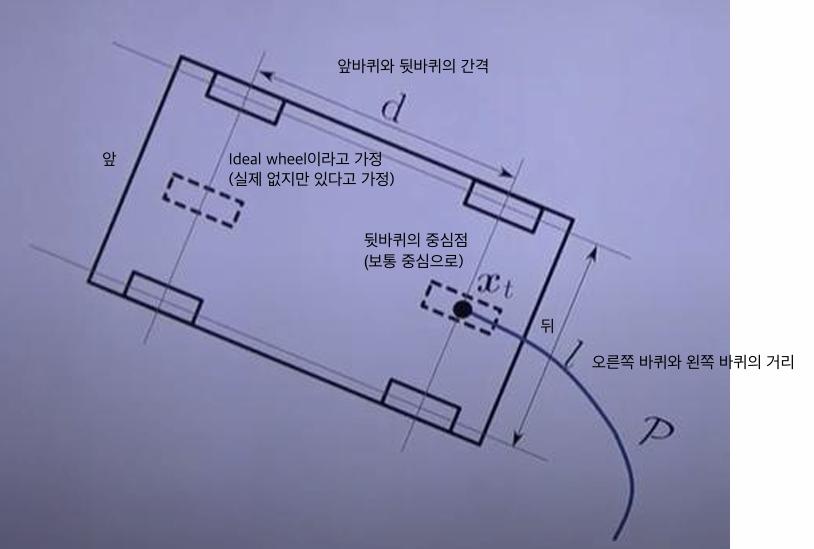

반경 r로 회전을 하기 위해
- δ : Ideal Wheel을 기준으로 바퀴가 얼마나 꺾어져야 하는가
- d: 앞뒤 바퀴의 간격 / r : 회전 반경(차량의 중간에서 ICC까지의 거리가 기준)
- Holonomic : 물체가 움직일 수 있는 공간이 제한적 / ex) 기차
- Non-holonomic : 공간은 어디든지 갈 수 있지만 바로 못가는 경우 / ex) 4륜 구동 자동차
=> 이 둘은 반대되는 의미는 아니다!
Motion models
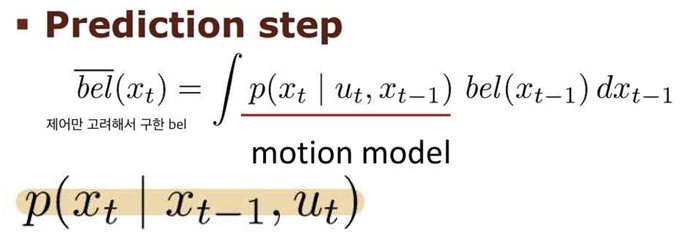
: action u가 로봇을 Xt-1에서 Xt로 이동시킬 사후확률(Posterior Probability)를 명시한다.
Motion model에는 아래의 2가지 type이 있다.
- 1. Odometry-based models
- 몇 바퀴 돌았는지 측정 센서(Wheel Encoder)를 달아 놓아서 측정한다.Nose Model for Odometry


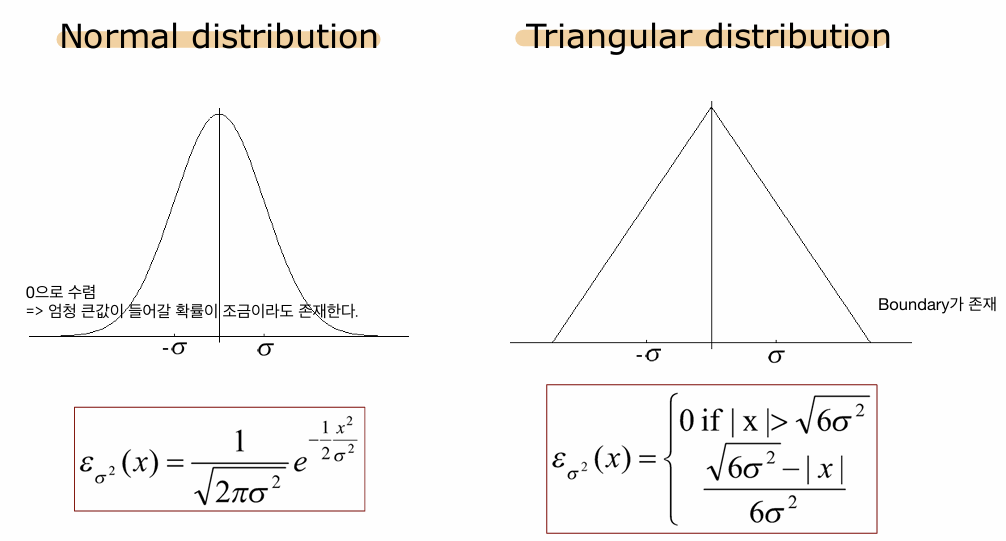
- Typical Distribusions for Probabilistic Motion Models
# Algorithms

- 2. Velocity-based models (Dead Reckoning)
- 순수 제어 신호를 이용하여 측정한다. (no Wheel Encoders)
- 얼만큼 제어신호를 줬으니 얼마나 움직였을 것이다.수식 봐보기 Noise Parameterization


- Motion models : 로봇이 t-1에서 t로 움직였을 때 여기에 있을 확률을 계산
=> 이때 주어지는 값은 이전 위치와 제어신호
- Odometry-based model : Rotation-Translation-Rotation
- Velocity-based model : 선속도, 각속도, Heading 회전속도